The lab has several workstations with specialized software (MATLAB/Simulink®, LabVIEW, QUARC® Real-Time Control Software, MS Visual Studio etc.) and hadware such as the following:
Haptic Devices:
The Geomagic® Touch™ haptic devices


Novint Falcon haptic devices
Gesture Control Devices:
Myo Armband


Leap Motion
Microsoft Kinect

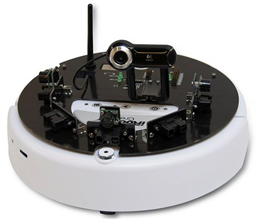
The Qbot Autonomous Robot (Quanser Inc.)
Mini-Cooper (custom-made by Cooper Thompson, 2014)

The Q8-USB data acquisition device (Quanser Inc.)
Pittman DC Gear motors with encoders